DCC
MiniMaus
Roco
Manipulator MiniMaus
Aby zaprogramować układ PIC, skorzystaj z pliku PIC16F628
Opis Manipulatora
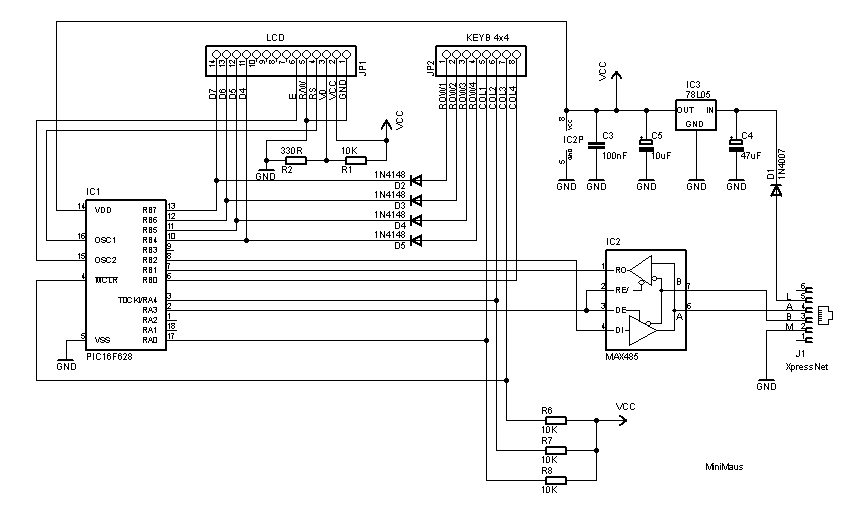
Schemat ideowy manipulatora pokazano na rysunku. Jego sercem jest procesor PIC16F628A (IC1). Do komunikacji z użytkownikiem służy klawiatura wykonana z 4X4 mikroprzełączników oraz wyświetlacz LCD 2×16 znaków. Wymianę informacji z manipulatorem zapewnia układ MAX485. Dzięki zastosowaniu interfejsu RS485 jest możliwe podłączenie do 32 urządzeń. Jednak maksymalnie może ich być 30, ponieważ jedną możliwość podłączenia zajmuje centralka, a drugą interfejs do komputera. Jeśli byłoby konieczne uruchomienie 31 manipulatorów. Manipulator jest zasilany z centralki tym samym kablem, którym są przesyłane informacje. Napięcie zasilające jest stabilizowane przez IC3 (LM78L05). Zapewnia on zasilanie dla procesora, sterownika LCD oraz podświetlania wyświetlacza.
Montaż i uruchomienie
Montaż rozpoczynamy od elementów najmniejszych. Wyświetlacz i klawiaturę montujemy na samym końcu.
Zanim zamkniemy sterownik w obudowie, umieszczamy w podstawce zaprogramowany procesor i łączymy manipulator z boosterem kablem czterożyłowym. Może to być kabel płaski (telefoniczny). Przypadkowe podłączenie manipulatora z centralką „obróconym” kablem płaskim, nie uszkodzi urządzeń. Po podłączeniu manipulatora do centralki mamy ustawiamy kontrast wyświetlacza R2 R1.
Obsługa
Pierwszą czynnością jest nadanie manipulatorowi unikalnego numeru. Manipulatory mogą przyjmować numery od 1 do 31. Przy nadawaniu numerów manipulatorom, należy pamiętać, że domyślnym numerem dla interfejsu komputerowego jest 29. Aby nadać numer należy podczas włączania manipulatora przytrzymać wciśnięty klawisz ENT. Na ekranie zobaczymy komunikat Xbus Address: 01. Klawiszami lewo/prawo odpowiednio zwiększamy lub zmniejszamy jego nastawę. Naciskając klawisz MENU przechodzimy do ekranu wyboru typu centralki. Na ekranie pojawi się komunikat:
Command station
Roco
Klawisze lewo/prawo umożliwiają dokonanie wyboru trybu pracy pomiędzy „Roco” a „Lenz”. W przypadku współpracy z poprzednio opisaną centralką NanoX ustawiamy Lenz. Menu nastaw konfiguracji manipulatora opuszczamy naciskając klawisz STOP.
Po włączeniu manipulatora lub wyjściu z jego konfigurowania zobaczymy ekran powitalny, a po nim ekran główny:
Select Loco 0003
000 128 F*
Jeśli zamiast niego pojawią się komunikaty:
Command station
Not found!
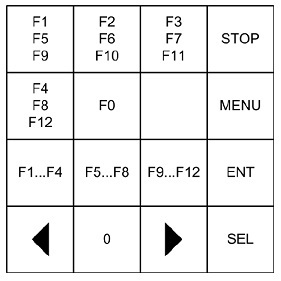
oznacza to, że brak jest komunikacji z centralką. Przyczynami mogą być np. uszkodzony kabel, zwarcie linii RS485 itp.Podczas wyświetlania ekranu głównego klawisze spełniają funkcje pokazane na rysunku.
I tak naciśnięcie:
– „>” zwiększa prędkość lokomotywy,
– „<” zmniejsza prędkość lokomotywy,
– „0” zatrzymuje lokomotywę,
– „SEL” zmienia kierunek jazdy lokomotywy,
– „STOP” wyłącza zasilanie makiety (zatrzymanie awaryjne wszystkich lokomotyw),
– „MENU” powoduje wejście do menu sterowania akcesoriami,
– „ENT” powoduje wejście do menu wyboru numeru obsługiwanej lokomotywy,
– „F1...F4” włącza grupę klawiszy funkcyjnych F1...F4,
– „F5...F8” włącza grupę klawiszy funkcyjnych F5...F8,
– „F9...F12”: włącza grupę klawiszy funkcyjnych F9...F12.
Dolny wiersz wyświetlacza pokazuje:
kierunek jazdy, aktualną prędkość, liczbę kroków nastawy prędkości oraz stan wyjść funkcyjnych (oświetlenie, F1/5/9, F2/6/10, F3/7/11, F4/8/12).
Gdy znajdujemy się w menu wyboru numeru lokomotywy (klawisz ENT w menu głównym), zobaczymy komunikaty:
Select Loco: 0003
>000# 128 F*--||
Klawiszami 0...9 można wprowadzić numer lokomotywy w zakresie 1...9999.
Numer można też zmieniać klawiszami prawo/lewo. Klawisz „SEL” wybiera sterowanie silnikiem lokomotywy w 14, 28 lub 128 krokach. Naciśniecie „ENT” powoduje wyjście z menu.
Podczas wyświetlania ekranu głównego, naciskając klawisz „MENU” przechodzimy do sterowania akcesoriami (zwrotnicami). Na ekranie LCD pojawi się komunikat Turnout: 999. Klawiszami 0...9 z zakresu 0...999 wybieramy numer dekodera akcesoriów. Klawisze lewo/prawo przełączają wskazaną zwrotnicę. Kolejne
naciśniecie „MENU” wywoła ekran dostępu do rejestrów CV:
CV Direct Loco
001-003 003
Klawiszami lewo/prawo wybieramy sposób programowania (Direct Mode, Pa-ged Mode, Register, PoM). Klawiszami 0...9 wprowadzamy adres rejestru do zapisu/odczytu. Naciśnięcie „ENT” spowoduje odczytanie rejestru z dekodera i wyświetlenie jego wartości na wyświetlaczu. Jeśli jest to niemożliwe (np. dekoder nie obsługuje RailCom) zamiast wartości pojawia się znak zapytania. Naciśnięcie klawisza „SEL” spowoduje przesunięcie kursora. Teraz można wpisać wartość, którą chcemy zaprogramować. Naciśnięcie ENT urucho-mi procedurę zapisu. Tak więc czy klawisz „ENT” spowoduje zapis czy odczyt rejestru, zależy od miejsca, w którym znajduje się kursor.
Maksymalna liczba manipulatorów zależy od trzech czynników:
– obciążalności RS485 (w przypadku układów MAX485 mogą to być 32 układy, dla MAX487 128 układów),
– ograniczenia w programie NanoX (w tej wersji 31 manipulatorów),
– wydajności prądowej centralki i zastosowanego podświetlenia w manipulatorach (tabela).
Manipulatorów pobierających dużo prądu możemy podłączyć aż piętnaście, natomiast gdy zastosujemy rezystor, który nieznacznie zmniejsza podświetlenie – dwadzieścia trzy. Jest to duża liczba, zupełnie wystarczająca na niedużych makietach. Przy większej liczbie lokomotyw i tak najczęściej steruje się nimi z komputera. Manipulatory służą głównie do obsługi lokomotyw manewrowych.Współczesne, negatywowe wyświetlacze z podświetleniem, pobierające prąd zasilania rzędu 20 mA, kosztują poniżej 30 złotych. Wyświetlacze z podświetleniem wykonanym w starej technologii, pobierające 300...500 mA kosztują około 22...24 złotych. Podłączając manipulatory warto to wziąć po uwagę.
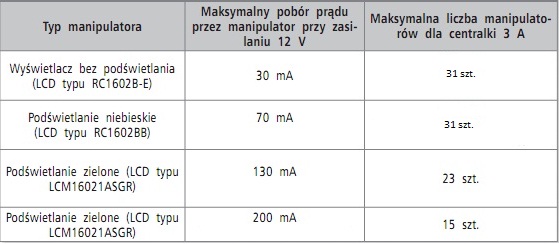
Maksymalna liczba manipulatorów dla centralki o wydajności 3A
Funkcje klawiszy manipulatora w menu głównym